Gettin' that Robot some Tasty Apples: Solving a simple geometrical puzzle in Z3 python
At work there is a monthly puzzler.
“Design a robot that can pick up all 9 apples arranged on a 3 by 3 rectangular grid, and spaced 1m apart. The robot parts they have are faulty. The robot can only turn three times”
I think the intent of the puzzle is that the robot can drive in forward and reverse, but only actually turn 3 times. It’s not very hard to do by hand. I decided to take a crack at this one using Z3 for funzies. Z3 is an SMT solver. It is capable of solving a interesting wide variety of problems.
I interpret this as “find 4 lines that touch all points in the grid, such that each subsequent line intersects.”
It is fairly easy to directly translate this into a Z3 model.
from z3 import *
import matplotlib.pyplot as plt
import numpy as np
s = Solver()
linenum = 4
def linepoint(l,p): #line point product. Is zero if point is on line
return l[0]*p[0] + l[1]*p[1] + l[2]
lines = [[Real(s + str(i)) for s in ('a','b','c')] for i in range(linenum)]
applepoints = [(x,y) for x in range(5) for y in range(3)]
turnpoints = [[Real(s + str(i)) for s in ('x','y')] for i in range(linenum-1)]
for pt in applepoints: #Every point needs to be touched by one line
s.add(Or([linepoint(l,pt)==0 for l in lines]))
for l in lines: #Exclude invalid lines (all zeros)
s.add(Or([a != 0 for a in l]))
for i in range(linenum-1): #Consecutive lines intersect (aren't parallel). There are other ways of doing this
s.add(linepoint( lines[i], turnpoints[i]) == 0)
s.add(linepoint( lines[i+1], turnpoints[i]) == 0)
def convert(x):
if is_int_value(x):
return x.as_long()
elif is_rational_value(x):
return x.numerator_as_long()/x.denominator_as_long()
elif is_algebraic_value(x):
return convert(x.approx(7))
print(s.check())
m = s.model()
#print("x = %s" % m[x])
#print "traversing model..."
for d in m.decls():
print("%s = %s" % (d.name(), m[d]))
#nplines = np.array([[m[a].numerator_as_long()/m[a].denominator_as_long() for a in l] for l in lines])
nplines = np.array([[convert(m[a]) for a in l] for l in lines])
#xs = np.random.randn(2,3)
#xs = np.
print(nplines)
for l in nplines:
pts = []
for j in [-1,1]:
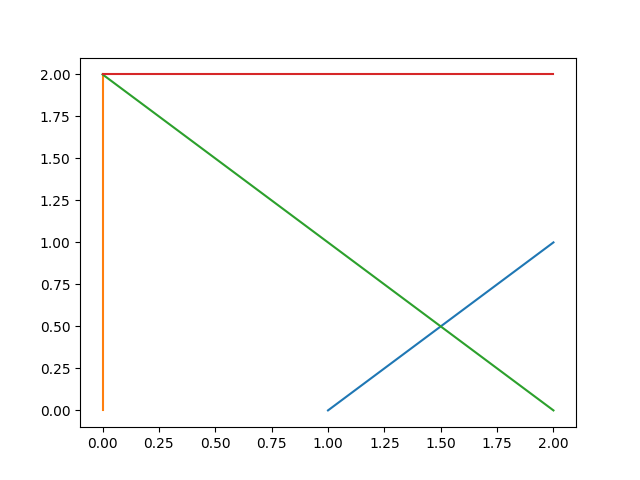
# We can use Z3 to draw a nice set of lines too
opt = Optimize()
x, y = Reals('x y')
opt.add([0 <= x, x <= 2, 0 <= y, y <= 2])
opt.add(l[0] * x + l[1]*y + l[2] == 0)
opt.minimize(j*0.453 * x + j*0.3234 * y) # random objective direction hopefully not perpendicular to a line
print(opt.check())
m = opt.model()
pts.append([convert(m[x]), convert(m[y])])
print(l)
pts = np.array(pts).T
plt.plot(pts[0,:], pts[1,:])
plt.show()
A couple comments:
If we ask z3 to use only 3 lines, it returns unsat. Try to prove that by hand.
However, If the robot is on the projective plane, it is possible with 3 lines. It only needs to drive to infinity and turn twice. All lines intersect exactly once on the projective plane. How convenient.
The problem only seems somewhat difficult to computerize because of the seemingly infinite nature of geometry. If we only consider the lines that touch at least two points, all possible robot paths becomes extremely enumerable. Is there a proof that we only need these lines?
Another interesting approach might be to note that the points are described by the set of equations \(x*(x-1)*(x-2)=0\) and \(y*(y-1)*(y-2)=0\) . I think we could then possibly use methods of nonlinear algebra (Groebner bases) to find the lines. Roughly an ideal containment question? Don’t have this one fully thought out yet. I think z3 might be doing something like this behind the scenes.